Jacobi method
From CFD-Wiki
The Jacobi method is an algorithm in linear algebra for determining the solutions of a system of linear equations with largest absolute values in each row and column dominated by the diagonal element. Each diagonal element is solved for, and an approximate value plugged in. The process is then iterated until it converges. This algorithm is a stripped-down version of the Jacobi transformation method of matrix diagonalization. The method is named after German mathematician Carl Gustav Jakob Jacobi.
We seek the solution to set of linear equations:

In matrix terms, the definition of the Jacobi method can be expressed as :
![\phi^{(k+1)} = D^{ - 1} \left[\left( {L + U} \right)\phi^{(k)} + b\right]](/W/images/math/2/5/1/251a2f655111e185ad6346ba43ad3117.png)
where  ,
,  , and
, and  represent the diagonal, lower triangular, and upper triangular parts of the coefficient matrix
represent the diagonal, lower triangular, and upper triangular parts of the coefficient matrix  and
and  is the iteration count. This matrix expression is mainly of academic interest, and is not used to program the method. Rather, an element-based approach is used:
is the iteration count. This matrix expression is mainly of academic interest, and is not used to program the method. Rather, an element-based approach is used:

Note that the computation of  requires each element in
requires each element in  except itself. Then, unlike in the Gauss-Seidel method, we can't overwrite
except itself. Then, unlike in the Gauss-Seidel method, we can't overwrite  with , as that value will be needed by the rest of the computation. This difference between the Jacobi and Gauss-Seidel methods complicates matters somewhat. Generally, two vectors of size
with , as that value will be needed by the rest of the computation. This difference between the Jacobi and Gauss-Seidel methods complicates matters somewhat. Generally, two vectors of size  will be needed, and a vector-to-vector copy will be required. If the form of is known (e.g. tridiagonal), then the additional storage should be avoidable with careful coding.
will be needed, and a vector-to-vector copy will be required. If the form of is known (e.g. tridiagonal), then the additional storage should be avoidable with careful coding.
Contents |
Algorithm
Choose an initial guess  to the solution
to the solution
- for k := 1 step 1 until convergence do
- for i := 1 step until n do
-

- for j := 1 step until n do
- if j != i then
-
- end if
- if j != i then
- end (j-loop)
-
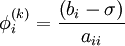
-
- end (i-loop)
- check if convergence is reached
- for i := 1 step until n do
- end (k-loop)

Convergence
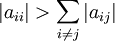
The method will always converge if the matrix A is strictly or irreducibly diagonally dominant. Strict row diagonal dominance means that for each row, the absolute value of the diagonal term is greater than the sum of absolute values of other terms:
The Jacobi method sometimes converges even if this condition is not satisfied. It is necessary, however, that the diagonal terms in the matrix are greater (in magnitude) than the other terms.
Example Calculation
As with Gauss-Seidel, Jacobi iteration lends itself to situations in which we need not explicitly represent the matrix. Consider the simple heat equation problem
![\nabla^2 T(x) = 0,\ x\in [0,1]](/W/images/math/6/8/1/681af3c6083368314f689c744b5b198c.png)
subject to the boundary conditions  and
and  . The exact solution to this problem is
. The exact solution to this problem is  . The standard second-order finite difference discretization is
. The standard second-order finite difference discretization is

where  is the (discrete) solution available at uniformly spaced nodes (see the Gauss-Seidel example for the matrix form). For any given for
is the (discrete) solution available at uniformly spaced nodes (see the Gauss-Seidel example for the matrix form). For any given for  , we can write
, we can write
Then, stepping through the solution vector from  to
to  , we can compute the next iterate from the two surrounding values. For a proper Jacobi iteration, we'll need to use values from the previous iteration on the right-hand side:
, we can compute the next iterate from the two surrounding values. For a proper Jacobi iteration, we'll need to use values from the previous iteration on the right-hand side:
The following table gives the results of 10 iterations with 5 nodes (3 interior and 2 boundary) as well as  norm error.
norm error.
| Iteration |  |  |  |  |  | error
|
|---|---|---|---|---|---|---|
| 0 | 0.0000E+00 | 0.0000E+00 | 0.0000E+00 | 0.0000E+00 | 1.0000E+00 | 1.0000E+00 |
| 1 | 0.0000E+00 | 0.0000E+00 | 0.0000E+00 | 5.0000E-01 | 1.0000E+00 | 6.1237E-01 |
| 2 | 0.0000E+00 | 0.0000E+00 | 2.5000E-01 | 5.0000E-01 | 1.0000E+00 | 4.3301E-01 |
| 3 | 0.0000E+00 | 1.2500E-01 | 2.5000E-01 | 6.2500E-01 | 1.0000E+00 | 3.0619E-01 |
| 4 | 0.0000E+00 | 1.2500E-01 | 3.7500E-01 | 6.2500E-01 | 1.0000E+00 | 2.1651E-01 |
| 5 | 0.0000E+00 | 1.8750E-01 | 3.7500E-01 | 6.8750E-01 | 1.0000E+00 | 1.5309E-01 |
| 6 | 0.0000E+00 | 1.8750E-01 | 4.3750E-01 | 6.8750E-01 | 1.0000E+00 | 1.0825E-01 |
| 7 | 0.0000E+00 | 2.1875E-01 | 4.3750E-01 | 7.1875E-01 | 1.0000E+00 | 7.6547E-02 |
| 8 | 0.0000E+00 | 2.1875E-01 | 4.6875E-01 | 7.1875E-01 | 1.0000E+00 | 5.4127E-02 |
| 9 | 0.0000E+00 | 2.3438E-01 | 4.6875E-01 | 7.3438E-01 | 1.0000E+00 | 3.8273E-02 |
| 10 | 0.0000E+00 | 2.3438E-01 | 4.8438E-01 | 7.3438E-01 | 1.0000E+00 | 2.7063E-02 |